
Die Forscher zeigten, dass der Rebenroboter eine Vielzahl schwerer und zerbrechlicher Gegenstände, wie etwa eine Wassermelone, sicher und stabil heben kann. Bildnachweis: Mit freundlicher Genehmigung der Forscher
Von Jennifer Chu
Im Gartenbau sind manche Reben besonders griffig. Während sie wachsen, können sich die holzigen Ranken mit so viel Kraft um Hindernisse winden, dass sie ganze Zäune und Bäume umreißen können.
Inspiriert von der zähen Zähigkeit von Weinreben haben Ingenieure am MIT und an der Stanford University einen Robotergreifer entwickelt, der sich um eine Vielzahl von Objekten schlängeln und diese anheben kann, darunter eine Glasvase und eine Wassermelone, was im Vergleich zu herkömmlichen Greiferkonstruktionen einen schonenderen Ansatz bietet. Eine größere Version der Roboterranken kann einen Menschen auch sicher aus dem Bett heben.
Der neue Bot besteht aus einer unter Druck stehenden Box, die in der Nähe des Zielobjekts positioniert wird und aus der sich lange, rankenartige Röhren aufblasen und wachsen, als würden Socken umgestülpt. Während sie sich ausdehnen, drehen und winden sich die Ranken um das Objekt, bevor sie zurück zur Kiste wandern, wo sie automatisch festgeklemmt und mechanisch wieder aufgewickelt werden, um das Objekt sanft in einem weichen, schlingenartigen Griff anzuheben.
Die Forscher zeigten, dass der Rebenroboter eine Vielzahl schwerer und zerbrechlicher Gegenstände sicher und stabil heben kann. Der Roboter kann sich auch durch enge Räume und Unordnung zwängen, um ein gewünschtes Objekt zu erreichen und zu ergreifen.
Das Team geht davon aus, dass diese Art von Robotergreifer in einer Vielzahl von Szenarien eingesetzt werden könnte, von der landwirtschaftlichen Ernte bis zum Be- und Entladen schwerer Fracht. Kurzfristig erforscht die Gruppe Anwendungen in der Altenpflege, wo weiche, aufblasbare Roboter-Ranken dabei helfen könnten, eine Person sanft aus dem Bett zu heben.
„Eine Person aus dem Bett zu bringen, ist eine der körperlich anstrengendsten Aufgaben, die eine Pflegekraft ausführt“, sagt Kentaro Barhydt, Doktorand am Department of Mechanical Engineering des MIT. „Ein solcher Roboter kann den Pfleger entlasten und für den Patienten schonender und komfortabler sein.“
Barhydt stellt zusammen mit seinem Co-Erstautor aus Stanford, O. Godson Osele, und ihren Kollegen das neue Roboterdesign in der Zeitschrift Science Advances vor. Die Co-Autoren der Studie sind Harry Asada, Ford-Professor für Ingenieurwissenschaften am MIT, und Allison Okamura, Richard W. Weiland-Professorin für Ingenieurwissenschaften an der Stanford University, zusammen mit Sreela Kodali und Cosmia du Pasquier von der Stanford University und dem ehemaligen MIT-Doktoranden Chase Hartquist, jetzt an der University of Florida, Gainesville.
Offen und geschlossen
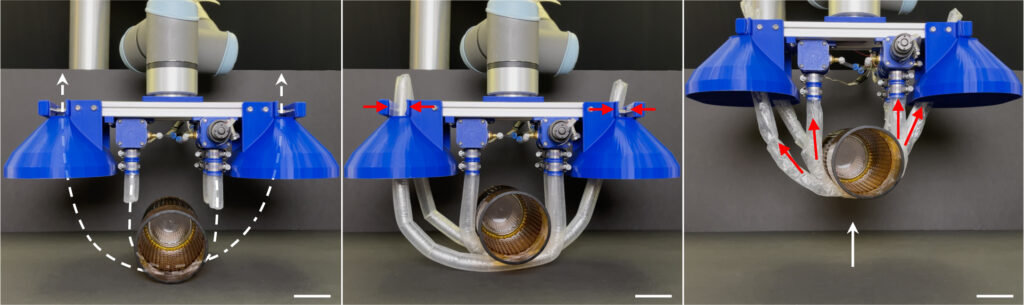 Während sie sich ausdehnen, drehen und winden sich die Ranken um das Objekt, bevor sie zurück zur Kiste wandern, wo sie automatisch festgeklemmt und mechanisch wieder aufgewickelt werden, um das Objekt sanft in einem weichen, schlingenartigen Griff anzuheben. Bildnachweis: Mit freundlicher Genehmigung der Forscher.
Während sie sich ausdehnen, drehen und winden sich die Ranken um das Objekt, bevor sie zurück zur Kiste wandern, wo sie automatisch festgeklemmt und mechanisch wieder aufgewickelt werden, um das Objekt sanft in einem weichen, schlingenartigen Griff anzuheben. Bildnachweis: Mit freundlicher Genehmigung der Forscher.
Die Stanford-Mitarbeiter des Teams unter der Leitung von Okamura leisteten Pionierarbeit bei der Entwicklung weicher, von Weinreben inspirierter Roboter, die aus ihren Spitzen herauswachsen. Diese Designs bestehen größtenteils aus dünnen, aber robusten Pneumatikschläuchen, die mit kontrolliertem Luftdruck wachsen und sich aufblasen. Während sie wachsen, können sich die Röhren verdrehen, biegen und durch die Umgebung schlängeln und sich durch enge und überfüllte Räume zwängen.
Forscher haben hauptsächlich Rebroboter für den Einsatz bei Sicherheitsinspektionen sowie Such- und Rettungseinsätzen untersucht. Aber am MIT fragten sich Barhydt und Asada, deren Gruppe robotische Hilfsmittel für ältere Menschen entwickelt hat, ob solche von Weinreben inspirierten Roboter bestimmte Herausforderungen in der Altenpflege bewältigen könnten – insbesondere die Herausforderung, eine Person sicher aus dem Bett zu heben. In Pflege- und Rehabilitationseinrichtungen wird dieser Transfervorgang häufig mit einem Patientenlifter durchgeführt, der von einem Pfleger bedient wird, der den Patienten zunächst auf die Seite und dann zurück auf ein hängemattenartiges Laken bringen muss. Der Pfleger schnallt das Laken um den Patienten und hängt es an den mechanischen Lifter, der den Patienten dann sanft aus dem Bett heben kann, ähnlich wie beim Aufhängen einer Hängematte oder eines Tragetuchs.
Als Alternative stellte sich das MIT- und Stanford-Team vor, dass sich ein rankenartiger Roboter sanft unter und um einen Patienten schlängeln könnte, um eine eigene Art von Schlinge zu schaffen, ohne dass ein Pfleger den Patienten körperlich manövrieren müsste. Doch um die Schlinge anzuheben, erkannten die Forscher, dass sie ein Element hinzufügen mussten, das in bestehenden Weinroboter-Designs fehlte: Im Wesentlichen müssten sie den Kreislauf schließen.
Die meisten von Weinreben inspirierten Roboter sind als „Open-Loop“-Systeme konzipiert, d. Wenn ein Rankenroboter dazu gebracht werden könnte, sich von einem offenen Kreislauf in einen geschlossenen Kreislauf zu verwandeln, vermutete Barhydt, dass er sich in eine Schlinge um das Objekt verwandeln und sich zusammen mit dem, was oder wen auch immer er halten könnte, hochziehen könnte.
Für ihre neue Studie skizzieren Barhydt, Osele und ihre Kollegen den Entwurf für einen neuen, von Weinreben inspirierten Robotergreifer, der sowohl Aktionen mit offenem als auch mit geschlossenem Regelkreis kombiniert. In einer Open-Loop-Konfiguration kann eine Roboterrebe wachsen und sich um ein Objekt drehen, um einen festen Halt zu schaffen. Es kann sogar unter einem Menschen graben, der auf einem Bett liegt. Sobald der Griff erfolgt ist, kann die Ranke weiter zu ihrer Quelle zurückwachsen und sich daran festsetzen, wodurch eine geschlossene Schleife entsteht, die dann zurückgezogen werden kann, um das Objekt zu bergen.
„Die Leute gehen vielleicht davon aus, dass man, um etwas zu greifen, einfach die Hand ausstreckt und es greift“, sagt Barhydt. „Aber es gibt verschiedene Phasen, wie zum Beispiel das Positionieren und Halten. Durch den Übergang zwischen offenen und geschlossenen Kreisläufen können wir neue Leistungsniveaus erreichen, indem wir die Vorteile beider Formen für ihre jeweiligen Phasen nutzen.“
Sanfte Federung
Als Demonstration ihres neuen Open- und Closed-Loop-Konzepts baute das Team ein großes Robotersystem, das eine Person sicher aus einem Bett heben soll. Das System besteht aus einer Reihe von Druckkästen, die an beiden Enden einer Deckenstange befestigt sind. Eine Luftpumpe in den Boxen bläst sich langsam auf und entfaltet dünne, rankenartige Röhren, die sich bis zum Kopf- und Fußende eines Bettes erstrecken. Der Luftdruck kann gesteuert werden, um die Schläuche sanft unter und um eine Person herum zu bewegen, bevor sie sich wieder nach oben in ihre jeweiligen Boxen ausdehnen. Die Ranken werden dann durch einen Klemmmechanismus geführt, der die Ranken an jeder Kiste befestigt. Eine Winde windet die Ranken zurück in Richtung der Kisten und hebt dabei die Person sanft an.
„Schwere, aber zerbrechliche Objekte wie ein menschlicher Körper sind mit den heute verfügbaren Roboterhänden schwer zu greifen“, sagt Asada. „Wir haben einen rankenartig wachsenden Robotergreifer entwickelt, der einen Gegenstand umwickeln und sanft und sicher aufhängen kann.“
„Es gibt einen ganzen Designraum, von dem wir hoffen, dass diese Arbeit unsere Kollegen dazu inspiriert, weiter zu erforschen“, sagt Co-Hauptautor Osele. „Ich freue mich besonders auf die Auswirkungen auf Patiententransferanwendungen im Gesundheitswesen.“
„Ich bin sehr gespannt auf die zukünftige Arbeit, solche Roboter zur physischen Unterstützung von Menschen mit Mobilitätseinschränkungen einzusetzen“, fügt Co-Autor Okamura hinzu. „Im Gegensatz zu anderen Ansätzen wie humanoiden Robotern können weiche Roboter relativ sicher und kostengünstig sein und optimal auf spezifische menschliche Bedürfnisse zugeschnitten sein.“
Während das Design des Teams durch Herausforderungen in der Altenpflege motiviert war, erkannten die Forscher, dass das neue Design auch für andere Greifaufgaben angepasst werden könnte. Zusätzlich zu ihrem Großsystem haben sie eine kleinere Version gebaut, die an einem kommerziellen Roboterarm befestigt werden kann. Mit dieser Version hat das Team gezeigt, dass der Rebenroboter eine Vielzahl schwerer und zerbrechlicher Gegenstände greifen und heben kann, darunter eine Wassermelone, eine Glasvase, eine Kugelhantel, einen Stapel Metallstangen und einen Spielplatzball. Die Ranken können sich auch durch einen vollgestopften Behälter schlängeln, um einen gewünschten Gegenstand herauszuholen.
„Wir glauben, dass diese Art von Roboterdesign an viele Anwendungen angepasst werden kann“, sagt Barhydt. „Wir denken auch darüber nach, dies auf die Schwerindustrie anzuwenden und beispielsweise den Betrieb von Kränen in Häfen und Lagerhäusern zu automatisieren.“
Diese Arbeit wurde teilweise von der National Science Foundation und der Ford Foundation unterstützt.

MIT-Nachrichten
")


{kind=link}